ربات کابلی که تصاویر dxf را از کامپیوتر دریافت و روی تابلو رسم می کند.
این پروژ حاصل کار آقایان
مرتضی نوروزی
سعید وحیدی
و محمدقهرمانی
دانشجویان کارشناسی مهندسی مکانیک می باشد.
این پروژه بهینه سازی پروژه کنترل توپ روی یک صفحه است. در این پروژه سازۀ دستگاه مجددا طراحی و بهینه سازی شد. نرم افزار دستگاه نیز تغییر یافت طوریکه دستگاه به صورت برخط از طریق یک برنامۀ متلب به کامپیوتر متصل شده و از آن دستور می پذیرد.
پروژه با همکاری آقای کسری لطفعلی نژاد به عنوان بخشی از پایان نام کارشناسی اجرا شده است.
در این پروژه سیستمی مکانیکی طراحی شده که قابلیت تغییر زاویه ی یک ورق مسطح را در دو جهت داراست. این دو زاویه توسط دو موتور کنترل می شود. موقعیت توپ روی صفحه، توسط دوربین به دست آمده و به سیستم کنترل ارسال می گردد. ادامه ...
حاصل کار اين دانشجويان يک مکانيزم گوي و سطح شيبدار و دو برنامه کامپيوتري يکي براي ميکرو و ديگري به زبان C# براي pc است. اين سيستم قابليت استفاده در آزمايشگاه براي دانشجويان کنترل خطي را دارد. ادامه ...
دستگاه ساخته شده، نمونه ای آزمایشگاهی از یک ربات دلتا است. این ربات دارای سه درجه آزادی است. طوریکه دست ربات همواره به صورت افقی است و موقعیت آن در فضای کاری قابلیت کنترل دارد. ادامه...
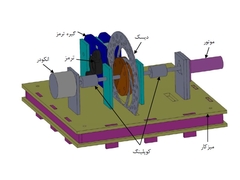
در این پروژه، برای طراحی گشتاورسنج دیناميکی از ترمز دیسکی دوچرخه استفاده شد. برای این منظور، ابتدا ميزکاری جهت استقرار پایه ها و قرارگيری ترمز، موتور و انکودر روی آنها طراحی شد. همانگونه که در شکل مشاهده میکنيد، یک نيروسنج درون ميزکار است که ميله فشاردهنده روی آن و زیر ترمز قرار گرفته است.