|
معرفی کنترل تطبیقی روش کنترلی استفاده شده برای یک سیستم دارای پارامترهای متفاوت یا نا مشخص می باشد. به عنوان مثال، یک هواپیما در حال پرواز، جرم آن به علت مصرف سوخت به آرامی کاهش مییابد؛ یک قانون کنترل مورد نیاز است که خود را با چنین تغییر شرایط سازگار کند. مبحث کنترل تطبیقی با کنترل مقاوم متفاوت است، زیرا به اطلاعات پیشین در مورد محدودیتهای پارامترهای نامشخص یا متغیر با زمان نیاز ندارد.پایه و اساس کنترل تطبیقی، تخمین پارامتر است که شاخه ای از شناسایی سیستم است. روشهای رایج تخمین شامل روش حداقل مربعات بازگشتی و گرادیان نزولی است. هر دو روش اشاره شده ، قوانین جدید را فراهم میکنند که برای اصلاح برآوردها (تخمین ها ) در زمان واقعی استفاده میشوند . پایداری لیاپانوف برای استخراج این قوانین و بروزرسانی آنها و معیار همگرایی استفاده میشود .
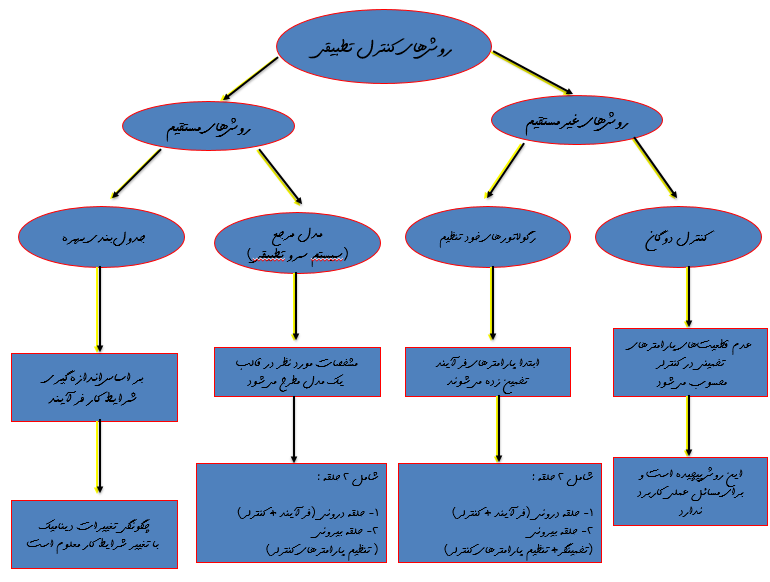
روش های کنترل تطبیقی
|
|
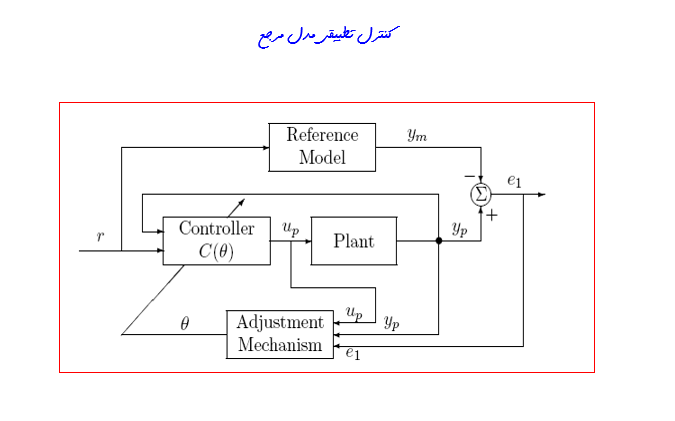
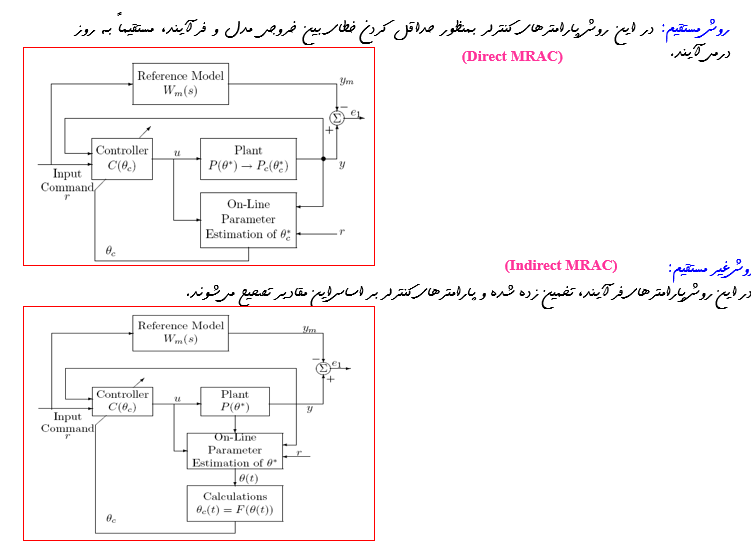
تئوری سیستم ها كنترل كننده تطبيقي به طور حسي: كنترل كنندهاي كه بتواند رفتارش را در پاسخ به ديناميك فرآيند و اغتشاشها تغيير دهد. تطبيق: فرآيندي است كه پارامترهاي سیستم را تصحيح كرده و عملكرد كنترل را بهبود ميبخشد. كنترل تطبيقي: روشی است كه اطلاعات پيوستهاي در مورد وضعيت حالتهاي فعلي فرآيند و به منظور شناسايي فرآيند، توليد ميكند. سپس عملكرد سيستم فعلي با وضعيت مطلوب يا بهينه مقايسه شده و بر اساس آن تصميمگيري به منظور تطبيق سيستم صورت ميگيرد. در نهايت به منظور رسيدن به وضعيت مطلوب، تصحيح مناسب در سيستم اعمال ميشود. بنابراين سه عمل شناسايي، تصميمگيري و تصحيح در يك سيستم تطبيقي وجود خواهند داشت. فرآيندهاي يك سيستم تطبيقي 1) شناسايي پارامترهاي ناشناخته يا اندازهگيري يك شاخص عملكرد(IP). 2) تصميمگيري بر روي روش كنترل. 3) تصحيح پارامترهاي كنترل کننده يا سيگنال ورودي يك سيستم كنترل تطبيقي از دو حلقه تشكيل ميشود : 1- يك حلقه فيدبك معمولي شامل فرآيند و كنترل كننده 2- حلقه تنظيم پارامتر
|