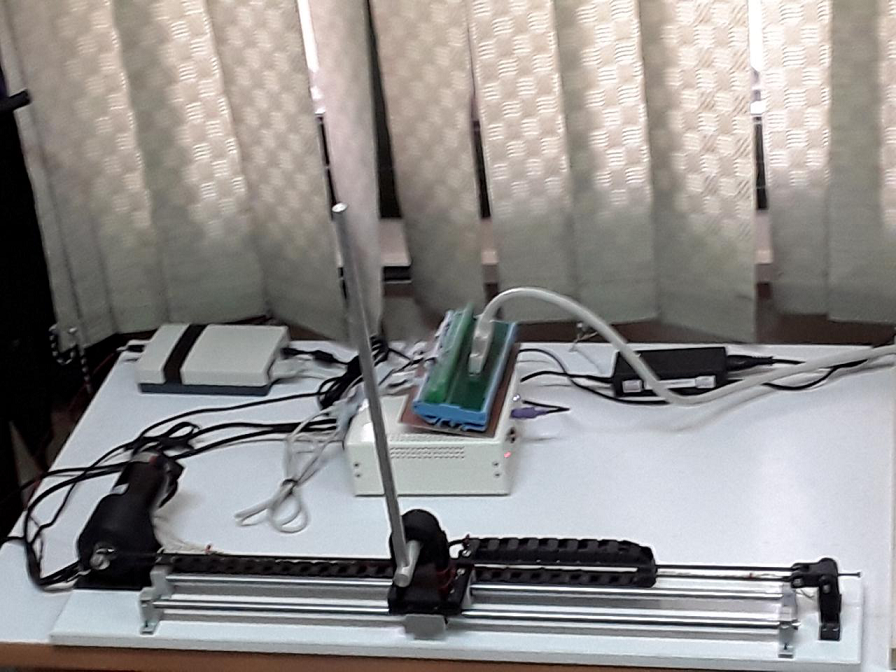
سیستم پاندول معکوس در کنترل خطی و غیرخطی به عنوان سیستم مکانیکی و دینامیکی زیرفعال مورد توجه بسیار می باشد. این سیستم، به علت کمتر بودن تعداد محرکها نسبت به درجات آزادی آن، زیرفعال است که خود محدودیتهای زیادی را برای آنچه که از طریقکنترلکننده میتوان بدست آورد، ایجاد میکند. زیرفعال بودن سیستم پاندول معکوس، یکی از چالشهای مهم کنترلی در آن میباشد؛ زیرا باید تنها با یک ورودی کنترلی، دو متغیر حالت کنترل شوند. پاندول معکوس آزمایشگاهی به منظور بررسی رفتار سیستم های مشابه در صنعت ارائه شده است. انواع سیستم های تعادلی مانند موشک، روبات های دوپا و ... از جمله سیستم های مشابه سیستم پاندول معکوس در صنعت می باشند. این سیستم، دارای دینامیک غیر خطی، ناپایدار و به شدت ارتجاعی است. پاندول معکوس زمانی پایدار است که پاندول به صورت قائم قرار گرفته و بدون نوسان و جابجایی باشد.